 Apptronik is focused on designing and developing bleeding edge technologies to empower the next generation of robotics. We specialize in developing compact series elastic actuators (SEA) that are highly efficient, power dense, and robust. In addition, we are world leaders in the integration of these actuators into robotic systems (e.g., humanoid robots) that are controlled using multi-input-multi-output feedback controllers such as Whole Body Operational Space Control (WBOSC). We are pushing the boundaries of robotic actuation technologies with the aim of making legged robots practically useful and reliable. We draw upon our past mechatronic and control software contributions for advanced legged robots including NASAu2019s Valkyrie humanoid robot and Mekau2019s Hume point foot biped.
Apptronik is focused on designing and developing bleeding edge technologies to empower the next generation of robotics. We specialize in developing compact series elastic actuators (SEA) that are highly efficient, power dense, and robust. In addition, we are world leaders in the integration of these actuators into robotic systems (e.g., humanoid robots) that are controlled using multi-input-multi-output feedback controllers such as Whole Body Operational Space Control (WBOSC). We are pushing the boundaries of robotic actuation technologies with the aim of making legged robots practically useful and reliable. We draw upon our past mechatronic and control software contributions for advanced legged robots including NASAu2019s Valkyrie humanoid robot and Mekau2019s Hume point foot biped.
Recent News Items

From events like MODEX and GTC to new product launches, there was no shortage of robotics news to cover in March 2024.
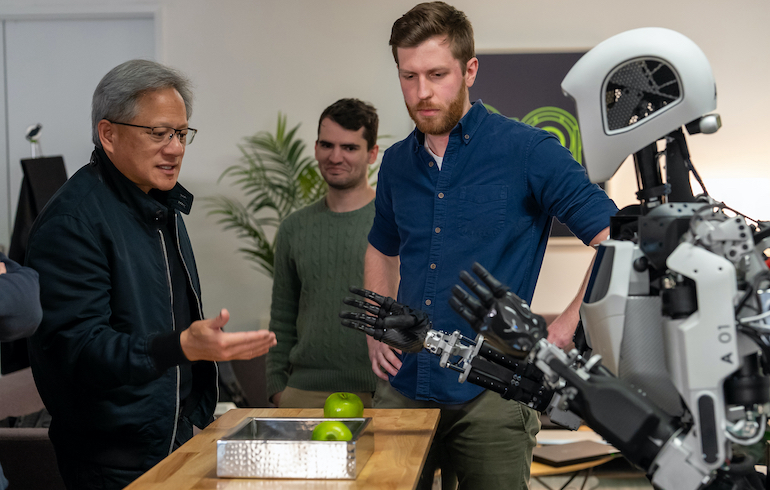
Apptronik is working with NVIDIA’s Project GR00T to enable general-purpose humanoid robots to learn complex tasks.

This episode of the podcast is a recap of robotics solutions from MODEX 2024.

NVIDIA CEO Jenson Huang wowed the crowd in San Jose with the company’s latest processor, AI, and simulation product announcements.

Mercedes is exploring how to use Apptronik’s humanoid for automating some low-skill, physically challenging tasks.

Gates noted that he has been more interested in companies that are working to solve dexterity and mobility issues with robots.
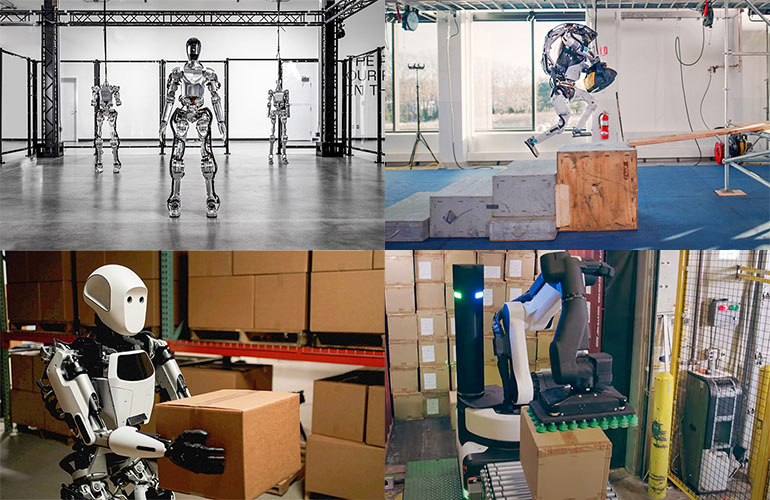
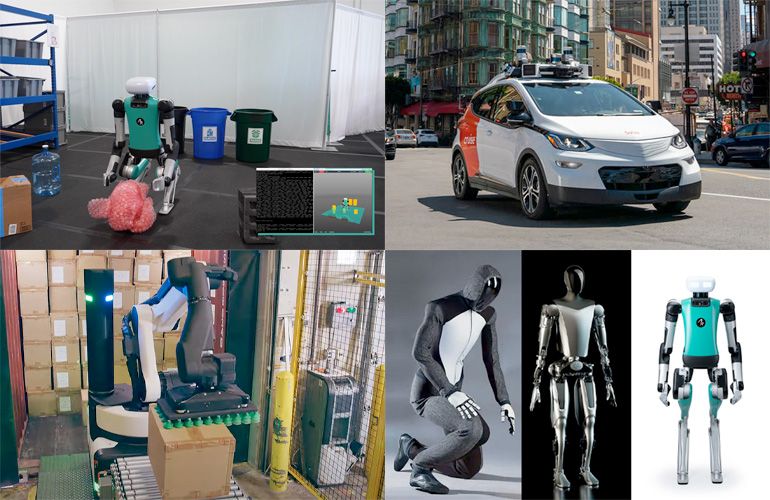
In the robotics industry, 2023 was the year of the humanoids. They dominated the news cycle, and our most popular content was no exception.
2023 was full of highlights and lowlights. In this year in review episode, we discuss the top robotics stories with our special guests.

On this episode, Apptronik CEO Jeff Cardenas details the new Apollo humanoid and take us through the history of bipedal development at the company.

Apptronik unveils Apollo, its first commercial humanoid that is capable of lifting 55 lbs and focusing on gross manipulation tasks in warehouses.
Photo Gallery

Apptronik